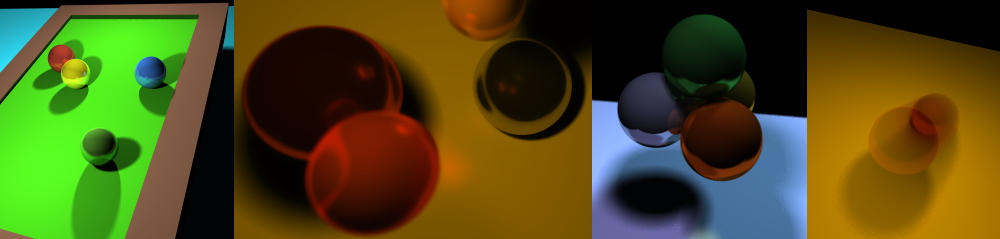
Câmeras reais tem sistemas de lentes que focalizam a luz a traves de uma abertura finita no plano da imagem. Como a abertura tem uma área, um ponto da cena é projetado numa área no plano da imagem chamada círculo de confusão. Correspondentemente uma área finita da cena é visível desde um ponto do plano da imagem, dando uma imagem borrada.
O tamanho do circulo de confusão é afetado pelo raio de apertura da lente e pela distancia entre o objeto e a lente. A distancia focal é a distancia entre a lente e o plano que contem os objetos cujas projeções no plano da imagem tem circulo de confusão com raio igual a zero. Na realidade, os objetos permanecem em foco, em tanto o circulo de confuso seja menor que o tamanho de um pixel.
O tamanho da faixa na qual os objetos permanecem em foco é chamada de profundidade de campo. Câmeras projetivas precisam de 2 parâmetros extras para definir profundidade de campo: o tamanho de apertura da lente e a distancia focal.
A matemática envolvida no cômputo de círculos de confusão para lentes simples não é complicada , e pode ser facilmente modelada no Ray tracer. Somente é preciso escolher um ponto na lente e encontrar o raio do ponto no filme que passa na lente pelo ponto dado tal que os objetos no plano focal continuem em foco. Infelizmente é preciso traçar muitos raios para cada pixel da imagem a fim de obter um resultado apreciável.
O modelo físico estudado para o caso de uma lente delgada é o representado na figura 4.1.a, entanto que a efeitos de simplificação, implementamos o modelo apresentado na figura 4.2. derivando-o do modelo 4.1.b. Como pode ser observado, no modelo físico temos a lente entre o plano do filme e os objetos da cena, enquanto que no modelo projetivo utilizado para descrever cenas 3D computacionalmente costuma-se utilizar um modelo no qual o plano de projeção está entre o ponto de vista (lente) e os objetos da cena a fim de simplificar efeitos físicos tais como inversão da imagem. Com a finalidade de simplificar os cálculos envolvidos, implementamos o modelo 4.2 considerando que vamos tomar amostras bem distribuídas sobre a superfície da lente, e portanto não é preciso se preocupar com fenômenos de inversão.
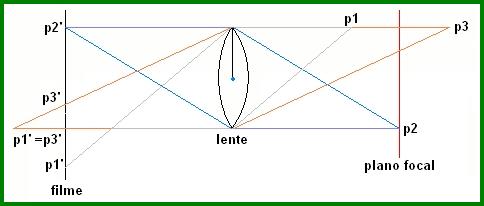
figura 4.1a: Modelo físico de uma lente delgada. Os pontos p1 e p3 não estão no plano focal, assim a região do filme onde p1 e p3 são mapeados aparece borrada. O ponto p2 está no plano focal, assim sua projeção no plano da imagem p2' está em foco. A medida que aumentamos o raio da lente ou nos afastamos do plano focal, os objetos ficam mais disfocados e portanto mais borrados na imagem.
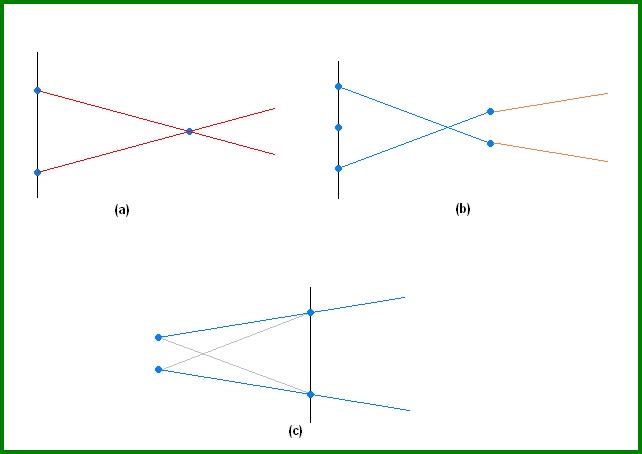
figura 4.1b: (a) Para uma câmera de furo, cada ponto no plano da imagem tem associado com ele um único raio da câmera, que pasa pelo furo da camera. (b) Para o modelo de abertura finita, amostramos o ponto no disco da lente e encontramos as direções dos raios calculando a direção do ponto na lente para o ponto no plano focal tal que o raio que passa pelo centro da lente também o intersecta. (c) Simplificação do modelo (b) colocando o plano da imagem entre a lente e a cena.
Considerando os pontos da lente como equiprováveis, utilizaremos amostragem estratificada para amostrar pontos na lente. Estudaremos dois tipos de estratificação do disco unitário tais que os estratos tem áreas iguais:
Estratificação angular:
Trata-se de uma amostragem uniforme do disco unitário pois divide o mesmo em regiões de igual área (figura 4.1.1). Temos a função de probabilidade considerada para r [0,1]  ![$[0, 2\pi]$](c2g_img51.png)
 e e
 A transformação de amostras A transformação de amostras
 uniformemente distribuídas sobre o quadrado unitario é dada então por uniformemente distribuídas sobre o quadrado unitario é dada então por
 . .
Estratificação concétrica:
Trata-se também de uma amostragem uniforme do quadrado unitario ![$[0,1]^2$](c2g_img52.png) no disco unitário. Como pode ser observado na figura 4.2.1 estratificação concéntrica mapeia quadrados em circulos, dividindo o circulo unitario em regiões não só de igual área senão tambem de formas semelhantes. Em outras palavras, a estratificação concéntrica aplica distorsões menores na forma relativa da regiões quando estas passam do quadrado unitario e são mapeadas no circulo. no disco unitário. Como pode ser observado na figura 4.2.1 estratificação concéntrica mapeia quadrados em circulos, dividindo o circulo unitario em regiões não só de igual área senão tambem de formas semelhantes. Em outras palavras, a estratificação concéntrica aplica distorsões menores na forma relativa da regiões quando estas passam do quadrado unitario e são mapeadas no circulo.
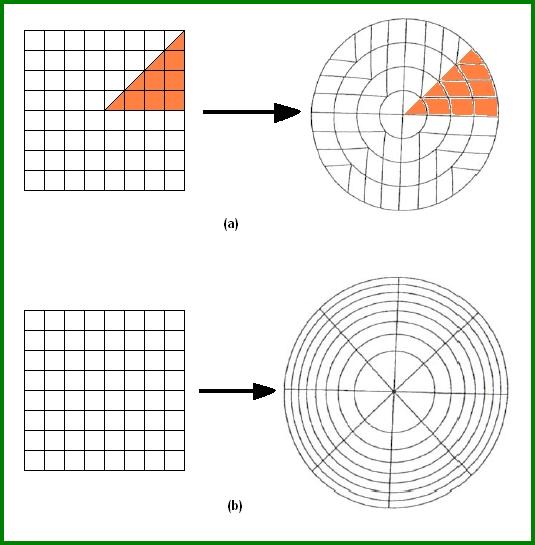
figura 4.4.1: (a) Amostragem uniforme por estratificação angular (b) Amostragem por estratificação concêntrica.
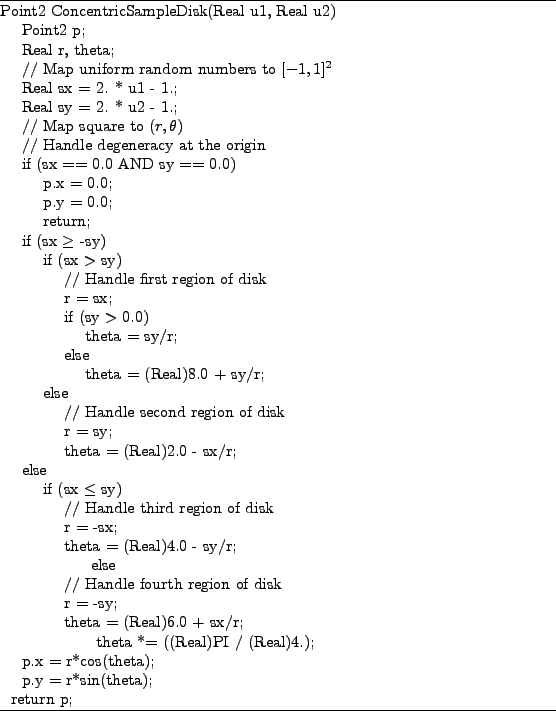
Implementação do ConcentricSampleDisk
|